4足歩行ロボット
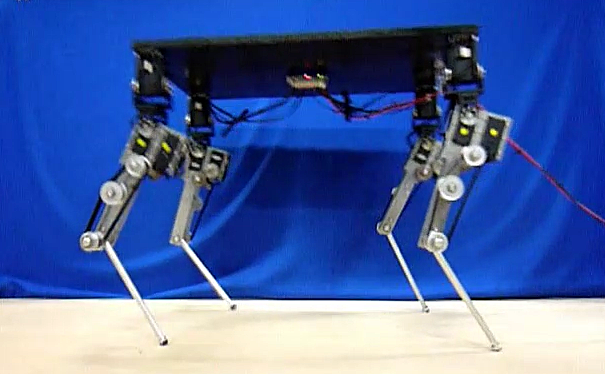
多くの動物は,動的な安定を保ちながら高速で移動可能な動的歩行を行っています.この動的歩行にはいくつかの歩行パターンがあり,移動速度に応じ単位長さ当たりのエネルギー消費量の少ない歩行パターンを選択しています.速度を変化させる時は歩行パターンを遷移させています.動的歩行のウォーク歩容からトロット歩容への遷移歩容について検討し,シミュレーションと実機モデルを用いた歩行実験を行いました.
動画
ウォークCG
ウォーク
トロットCG
トロット
遷移CG
遷移
他の研究へ
◀ 研究内容一覧へ